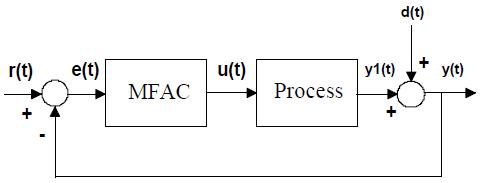
Figure 3-1 illustrates a single-loop feedback control system with a model-free adaptive controller. The input e(t) to the controller is presented by comparing the setpoint r(t) with the measured plant output y(t). Notice that y(t) is also called measured variable (MV) or process variable (PV) in many process control applications. y(t) is the plant response to controller output u(t) and the disturbance signal d(t). Notice that the control system structure has been kept as simple as a traditional single loop control system such as a PID system that makes the approach more valuable in real applications. It is a unique structure compared to many other advanced control systems.